| Topic 2 |
 Robots Anthropomorphes ou Sphériques Robots Anthropomorphes ou Sphériques |
|
|
Robots sphériques en action |
Vidéo pour 
|
|
Robots Scara |
|
|
Robots Scara en action |
Vidéo pour 
|
|
Baie de Commande de Robot |
|
|
Espace Articulaire et Espace Opérationnel |
|
|
MGD - MGI - Espace de Travail |
|
|
Robot 2 axes dans le plan (2D) |
|
|
MGD & MGI dans l'Espace (3D) |
|
|
| Topic 3 |
Exercice sur les espaces Atriculaires et Cartésiens sous RobotDK |
Extraits d'une vidéo d'exercices à distance en TD sur le simulateur RobotDK
|
|
| Topic 4 |
 Vidéo du cours de M. Ramdani Vidéo du cours de M. Ramdani |
|
|
| Topic 5 |
Capsule video, extrait du cours sur les processeurs |
|
|
| Topic 6 |
Capteur LVDT : Linear Variable Differential Transformer |
|
|
| Topic 7 |
capsule vidéo, extrait du cours sur les filtres |
|
|
| Topic 8 |
 Capsule Vidéo du cours #3 : Fonctionnement d'une caméra Capsule Vidéo du cours #3 : Fonctionnement d'une caméra |
|
|
 Introduction : Doter un robot de vision, pourquoi faire ? Introduction : Doter un robot de vision, pourquoi faire ? |
|
|
 Vision industrielle Vision industrielle |
|
|
| Topic 11 |
 Premiers jours, premières manipulations Premiers jours, premières manipulations |
Decouvertes et premieres manipulations de robots 'simples à prendre en main' lors de la semaine de rentrée de la LP Robotique (2020)
|
|
Robot Scara : premiers essais programmés |
|
|
Scara Adept : réorganisation de pieces |
|
|
Sphérique UR5 : première prises/deposes fines |
|
|
Sphérique UR5 : Vision, pick and place |
|
|
Chaine de mini-vidéos d'utilisation des robots |
durant les TPs, les étudiants peuvent se servir de ces petites vidéos pour compprendre comment utiliser chaque fonctionnalité du robot, au total autonomie.
|
|
Vidéos de manips faites par les étudiants sur leur chaine youtube LP Rob Bourges: |
|
|
Chaine Youtube de l'IUT de Bourges, Playlist de la LP Robotique |
|
|
| Topic 12 |
 [Cours] Niveau 3, la couche réseau [Cours] Niveau 3, la couche réseau |
Dans la séquence précédente sur la couche 2, nous avons vu tous les éléments qui permettent la communication dans un réseau donné : les adresses MAC qui permettent d'identifier les machines
sur le réseau, le protocole Ethernet qui définit comment les messages doivent être construits, et le switch qui s'occupe d'aiguiller les trames Ethernet
vers les bons destinataires.
Dans la couche supérieure, la couche 3, nous allons maintenant voir comment on peut communiquer avec des machines à l'extérieur de son propre réseau. Cette séquence va être intéressante
si vous souhaitez mieux comprendre comment fonctionne la téléopération ou même le fonctionnement d'Internet de manière générale. |
|
| Topic 14 |
I-1/ Les principes fondamentaux de la nouvelle approche |
|
|
III-2/ Normes mécaniques |
|
|
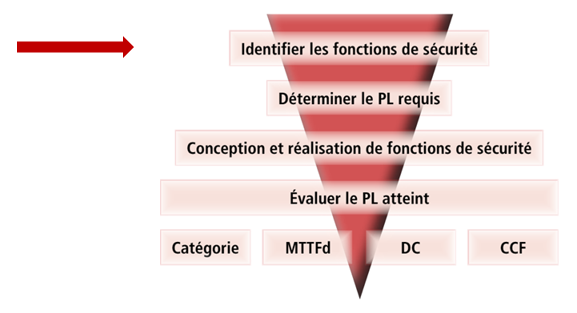
III-3a/ EN ISO 13849 & SISTEMA : Identifier les fonctions de sécurité |
|
|
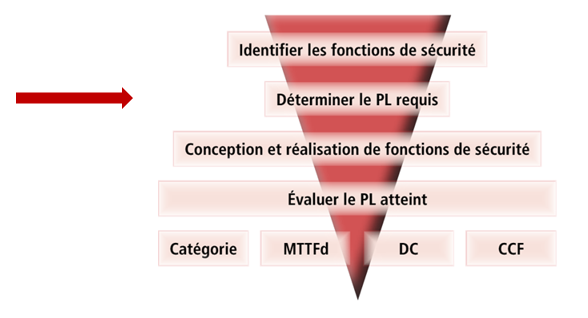
III-3b/ EN ISO 13849 & SISTEMA : Evaluation du niveau de performance requis |
|
|
| Topic 15 |
 Robot - ID card Robot - ID card |
|
|
| Topic 16 |
 Etude sur les Cobots faites par Alan Cartault et Baptiste Perriault en 2020-2021 Etude sur les Cobots faites par Alan Cartault et Baptiste Perriault en 2020-2021 |
|
|
Etude sur les Robots Cuisiniers faite par Laura Roussel et Samuel Juanola en 2020-2021 |
|
|
 Simulation de 2 postes Robotisés (pose carter et vissage) par Thomas Bertrand et Alan Cartault en 2020-2021 Simulation de 2 postes Robotisés (pose carter et vissage) par Thomas Bertrand et Alan Cartault en 2020-2021 |
|